
Detection of a flying drone by a pilot of a manned aircraft is almost impossible. It does not help to wrap the drone with reflective foil or place a signal diode on it (in daytime conditions). The pilots had a problem finding the drone, even though they were shown the height of the drone and its approximate location. The only solution to bypass the drone is a telemetry system that informs the pilot of the manned aircraft about the position and height of the drone.
In addition, maintaining a 30-meter separation between the maximum drone’s allowable flight height in the “open” category of 120 meters AGL and the minimum allowable flight height of a manned aircraft of 150 meters AGL is difficult to implement, and when flying over uneven terrain – impossible. The solution may be the need to use navigation systems using elevation maps to determine the current height above the terrain. urrently, the drone pilot has the altitude indicated above the take-off place, while the pilot of the crewed aircraft uses the altimeter set to the pressure above sea level QNH during the flight, and the knowledge of the elevation of the terrain is mainly limited to the airports to which he is about to fly and emergency airports. he current height above the ground is often assessed by eye.
In the case of a flight on a route where the elevation of the ground changes, both ships may collide, although they will maintain different (legally permissible) heights.
Test flow
On the first day, tests were carried out using the Cavalon gyroplane. The gyroplane allows for low speed flights – around 100 km / h and has large cabin glazing, which was to facilitate observation. The gyroplane was flying parallel to the belt axis at an altitude of 500 ft AGL (about 150 m). he pilots knew the height at which the drone would be located and knew its approximate location. Still, detecting a drone turned out to be a very difficult task. During the tests it was found that the use of the flash and reflective foil has very little effect on the visibility of the drone. Detection of the drone facilitates greater contrast between the aircraft and the background constituting the area over which it flies. A white drone was more visible against the dark green of the trees. The black drone was unnoticeable.
The most certainty of avoiding collisions is the use of a telemetry system that allows early detection of the drone and modification of the flight route. The system also makes it easier to search for a drone – pilots know where to look.
On the second day of testing, the flights were carried out on a Cessna 172 aircraft. The aircraft maintained speed
144 km/h. The aircraft performed circular flights, maintaining an altitude of 500 ft AGL. Due to the limited visibility from the aircraft cabin, the drone could be seen by the person on the side where BSP was passing. The drone, if detected, is in the position in which it was just passed. Limited visibility through the mask and propeller, distortion from the rounded glass and insect dirt appearing during the flight prevent detection of the drone on the collision course, regardless of placing the lamp on it or sticking it with reflective foil. Only running the application indicating the current position of the BSP allows for effective modification of the flight route in order to avoid a potential collision.
The solution to improve the detection of unmanned aerial vehicles (MR) can be a system that allows you to display the position of drones that fly at altitudes greater than 100 meters. he system should display the position and height of such a drone on the mobile device of a manned aircraft pilot as much in advance as possible, but not less than 1 km.
Justification for test analysis
The new EU regulations, which will be implemented in mid-2020, provide for the possibility of flying in the OPEN category up to an altitude of 120 m AGL (394 ft). anned aircraft pilots have the option of flying at a minimum height of 150 m AGL (with some exceptions). the flight range is higher than 120 m AGL, the drone pilot must obtain compliance with the Civil Aviation Authority (ULC) or complete the flight in accordance with the standard scenario published by ULC. The flight is then performed in the “special” category. Both the consistent and standard flight scenario may contain some restrictions and recommendations that the drone pilot must comply to apply such fate. Requirements may include an obligation to equip the drone with solutions that improve its visibility / detectability for manned airborne equipment, therefore results for response are needed, as some solutions improve drone’s visibility/detectability.
In manned aviation, flights are compliant with the VFR principle – flight with visibility or IFR – instrument flight. In the G-class space separation of aircraft is not provided – piloting on the VFR principles is responsible for handling separation based on sight indicators. During tests, it was checked whether the pilot of a manned aircraft could notice a drone on a collision course.
How to take measurements:
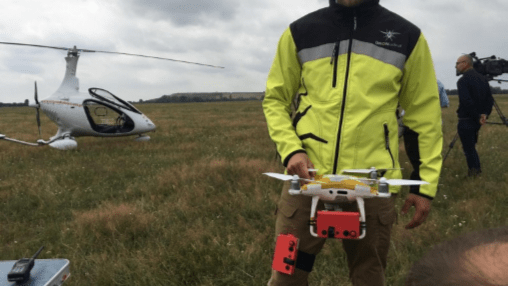
- Position monitoring devices based on GPS satellite signals were developed for testing. The devices also monitored altitude based on the manometer. Four monitoring devices have been prepared for testing: two for two drones and two for pilots.
- The data from the position recording devices were ripped to Excel 2019 format.
- The data has been prepared for presentation in the form of a 3D map.
- Data from individual scenarios were presented in a graphical form on the map, including a filter that allows the presentation of the position of the drone’s moment of detection.
- The measurement was made using the Google Earth tool – the distance between the drone and the place of detection of the drone by the pilot of the crewed aircraft was measured.
- The distance was entered in meters to the appropriate column in the results table.
- The measured distances were averaged for each of the trials.
- Trials where no drone was detected were not taken into account to calculate the average distance at which the drone was detected for the selected scenario.
- The number of drone detections was calculated for each scenario – the data was entered into the measurement table
Data format:
| Timdate (HR) | Lat | Long | VelE | VelN | Speed | Angle | Satel | BinIn(H) | Height |
| 16.07.2019 09:19:34 | 50.270653329062824 | 18.67679028537386 | 1 | 254 | 8 | 153 | 8 | 21 | 4 |
Data format
- Timdate (HR) – Time UTC
- Lat i Long – Coordinates in WGS 84
- VelE – Speed in East direction
- VelN – Speed in North direction
- Speed – Speed km/h
- Angle – Heading
- Satel – Numbers of satelites
- BinIn (H) Input parameters:
- * 21 – Flight in progress
- * 29 – Button pressed
- Height (ft) – Height in feet
- Parameter “–” means „same as previous” (data compression)
Tests Description:
On July 16-17, 2019 drone visibility tests were conducted to verify the effectiveness of various methods to improve detection of a drone from a manned aircraft. During the tests, it was also checked whether the drone pilot could detect the pilot of a manned aircraft by means of an image recorded with a drone camera. The position of the manned and unmanned aircraft was recorded by means of a telemetry system. The detection position of the drone was recorded on a measuring device specially prepared for testing. During the tests, all aircraft used a barometric altimeter with the QFE airport elevation pressure set. All altimeters indicated altitude in feet (ft).
During the tests, 40 flights were made, including 24 flights with the Auto Gyro Cavalon gyroplane and 16 flights with the Cessna 172 plane. Pilots of manned aircraft had the appropriate licenses and current class II medical examinations. The drones used for the test were DJI Phantom 4 pro v2 and DJI Matrice 200 V2. Drone pilots had UAVO qualification certificates with VLOS, BVLOS, INS, MR 25 kg certificates and special class medical certificates (so-called IV). The tests were carried out in accordance with 4 different drone equipment scenarios. The first scenario assumed a drone meeting, which is not equipped with any solution supporting its visibility. In the next scenario, the drone was equipped with a strobe flashing white light. The third scenario involved testing a drone covered with reflective foil. The last, fourth scenario assumed equipping the drone with a telemetry system presenting its position on board a manned aircraft in the form of an icon on the map of the application installed on the smartphone.
Monitoring devices have been installed on the drone in such a way that they do not affect the drone’s flying properties. Before commencing the actual tests, a drone flight with the installed device was carried out. The compliance of the data presented by the device was checked by comparing it with the data sent by the drone. Tests showed that the difference between the altimeter installed on the drone and the height indicated by the measuring device was about 20 ft.

The measuring device used by the pilots was attached to each of their thighs with Velcro tape. All devices were calibrated before take-off, and their altimeter was zeroed and set to the pressure at QNH airport level so that the altimeter on the airport apron points to 0 ft height above ground.
The position of detection by drone pilots of aircraft was recorded by pressing the button on the device. This forced the new record to be saved and the BinIn (H) parameter changed from 21 to 29, which in subsequent analysis made it possible to easily find the drone’s detection location.
The measuring device is equipped with a SIM card, which allows sending location data in real time to the server. The position is saved automatically at intervals of 8 seconds on average. A fully charged device allows registration for 8 hours.
Day I scenario 1
The first scenario, on the first day of testing, assumed a drone meeting, which is not equipped with any solution to improve its detectability. Black DJI Matrice 200 drone was used for the tests. The pilots performed a flight on the Cavalon gyroplane at a speed of about 100 km / h, at an altitude of 150 m AGL.
Detecting a black drone was a difficult task. In 12 tests, pilots detected the drone 11 times, from an average distance of 180 meters for the pilot-in-command of the aircraft and 396 meters for the second pilot. Drone detection was difficult due to the weak contrast between the drone color and the dark green of the environment.

| Scenario 1: The gyroplane | Lamp: NO | Painting: NO | DCAS: NO | Dron Matrice 200 |
| Recorded aircraft sighting distance | Ps1 vs PD | PS2 vs PD | Date: 16-07-2019 | |
| Trial 1 | 122 | 602 | ||
| Trial 2 | 328 | |||
| Trial 3 | 110 | 240 | ||
| Trial 4 | 207 | 395 | ||
| Trial 5 | 102 | 441 | ||
| Trial 6 | 361 | 374 | ||
| Average distance | 180 | 396 | ||
| Numbers of detction | 5 | 6 |

Day I scenario 2
The second scenario, on the first day of testing, assumed a drone meeting, which is equipped with a flashing omnidirectional lamp emitting white light. The DJI Matrice 200 drone black with the factory lamp on was used for testing. The pilots performed a flight on the Cavalon gyroplane at a speed of about 100 km / h, at an altitude of 150 m AGL.
The flashing lamp did not help detect the drone, but made it easier to keep your eyes on the drone. During the attempt, pilots of 12 approaches detected the drone 11 times. The average distance for the pilot-in-command was 212 meters. The average detection distance for the second pilot was 369 meters.

| Scenario 2: The gyroplane | Lamp: YES | Painting: NO | DCAS: NO | Dron Matrice 200 |
| Recorded aircraft sighting distance | Ps1 vs PD | PS2 vs PD | Date: 16-07-2019 | |
| Trial 1 | 83 | 225 | ||
| Trial 2 | 311 | 563 | ||
| Trial 3 | 330 | 224 | ||
| Trial 4 | 63 | 406 | ||
| Trial 5 | 153 | 430 | ||
| Trial 6 | 332 | |||
| Average distance | 212 | 396 | ||
| Numbers of detction | 6 | 5 |

Day I scenario 3
The third scenario, on the first day of testing, assumed meeting a drone covered with reflective foil. The DJI Phantom 4 pro V2 drone was used for the tests, which was covered with a certified reflective foil – the same as that used for wrapping emergency vehicles. The pilots performed a flight on the Cavalon gyroplane at a speed of about 100 km / h, at an altitude of 150 m AGL.
Sticking on the drone did not improve its visibility. For 12 attempts, pilots detected the drone 10 times. The average detection distance of the ship by the pilot-in-command was 252 meters. For the second pilot – 468 meters.
| Scenario 3: The gyroplane | Lamp: NO | Painting: YES | DCAS: NO | Dron DJI Phantom 4 pro |
| Recorded aircraft sighting distance | Ps1 vs PD | PS2 vs PD | Date: 16-07-2019 | |
| Trial 1 | 285 | |||
| Trial 2 | 191 | 228 | ||
| Trial 3 | 761 | |||
| Trial 4 | 203 | 444 | ||
| Trial 5 | 371 | 527 | ||
| Trial 6 | 213 | 384 | ||
| Average distance | 252 | 468 | ||
| Numbers of detction | 5 | 5 |

Day I scenario 4
The fourth scenario, on the first day of testing, assumed the meeting of a drone equipped with DCAS. The system allows the presentation of the drone’s position in real time on a smartphone located in the cockpit. The DJI Phantom 4 pro V2 drone was used for testing. The pilots performed a flight on the Cavalon gyroplane at a speed of about 100 km / h, at an altitude of 150 m AGL.
The use of the system significantly facilitated the detection of the drone in the air. On 12 attempts, pilots detected the drone 12 times. The average detection distance of the drone by the pilot-in-command was 271 meters. The average distance of detection of the drone by the second pilot was 287 meters.
The DCAS system makes it possible to detect a drone on a collision course and change the flight course long before it is seen. Knowing the position of the drone, pilots do not have to look for it, which is a heavy task because it requires focus and dedication of almost 100% concentration.
| Scenario 4: The gyroplane | Lamp: NO | Painting: NO | DCAS: YES | Dron DJI Phantom 4 pro |
| Recorded aircraft sighting distance | Ps1 vs PD | PS2 vs PD | Date: 16-07-2019 | |
| Trial 1 | 149 | 166 | ||
| Trial 2 | 438 | 324 | ||
| Trial 3 | 346 | 112 | ||
| Trial 4 | 329 | 596 | ||
| Trial 5 | 147 | 404 | ||
| Trial 6 | 219 | 124 | ||
| Average distance | 271 | 287 | ||
| Numbers of detction | 6 | 6 |
Day II scenario 1
The first scenario, on the second day of testing, assumed a drone meeting, which is not equipped with any solution to improve its detectability. Black DJI Matrice 200 drone was used for the tests. The pilot made a flight on a Cessna C-172 aircraft at a speed of about 144 km / h at an altitude of 150 m AGL. Only the pilot-in-command’s indications were noted during the tests.
Detecting the black drone was again a difficult task. For 4 tests, the pilot detected the drone only once at a distance of 308 meters. Observing a drone from a Cessna 172 aircraft is very difficult due to the higher flight speed than in a gyroplane and a much smaller field of view, which is additionally limited by a propeller, a large bonnet and much smaller glazing.

| Scenario 1: Plane C-172 | Lamp: NO | Painting: NO | DCAS: YES | Dron Matrice 200 |
| Recorded aircraft sighting distance | Ps1 vs PD | PS2 vs PD | Date: 17-07-2019 | |
| Trial 1 | n/d | |||
| Trial 2 | n/d | |||
| Trial 3 | n/d | |||
| Trial 4 | n/d | |||
| Average distance | 308 | |||
| Numbers of detction | 1 | n/d |

Day II scenario 2
The second scenario, on the second day of testing, assumed a drone meeting, which is equipped with a flashing omnidirectional lamp emitting white light. The DJI Matrice 200 drone black with the factory strobe turned on was used for testing. The pilots performed a flight on the Cessna 172 aircraft at a speed of about 144 km / h at an altitude of 150 m AGL.
The use of the lamp did not significantly affect the detection of the drone. For 4 tests, the pilot detected the drone twice, from an average distance of 452 meters. The lamp flashing from the indicated distance is not visible. The light signal could be seen only from a distance of about 200 meters.
| Scenario 2: Plane C-172 | Lamp: YES | Painting: NO | DCAS: YES | Dron Matrice 200 |
| Recorded aircraft sighting distance | Ps1 vs PD | PS2 vs PD | Date: 17-07-2019 | |
| Trial 1 | n/d | |||
| Trial 2 | 456 | n/d | ||
| Trial 3 | n/d | |||
| Trial 4 | 448 | n/d | ||
| Average distance | 452 | |||
| Numbers of detction | 2 | n/d |

Day II scenario 3
The third scenario, on the second day of testing, assumed a drone meeting, which is covered with reflective foil. The DJI Phantom 4 pro V2 drone was used for the tests – it was covered with a certified reflective foil – the same as that used for wrapping emergency vehicles. The pilots performed a flight on the Cessna C – 172 aircraft at a speed of about 144 km / h at an altitude of 150 m AGL.
Wrapping the drone with foil had little effect on improving visibility. For 4 tests, the pilot detected the drone twice, from an average distance of 397 meters.

| Scenario 3: Plane C-172 | Lamp: YES | Painting: YES | DCAS: YES | Dron DJI Phantom 4 pro |
| Recorded aircraft sighting distance | Ps1 vs PD | PS2 vs PD | Date: 17-07-2019 | |
| Trial 1 | n/d | |||
| Trial 2 | 434 | n/d | ||
| Trial 3 | n/d | |||
| Trial 4 | 360 | n/d | ||
| Average distance | 397 | |||
| Numbers of detction | 2 | n/d |

Day II scenario 4
The fourth scenario, on the second day of testing, assumed meeting with a drone equipped with the DCAS system. DJI Phantom 4 pro V2 equipment was used for testing. The pilots performed a flight on the Cessna C – 172 aircraft at a speed of about 144 km / h at an altitude of 150 m AGL.
The use of the DCAS system has improved drone detection. For 4 tests, the pilot spotted the drone 3 times. During the first flight, when the BSP ship was not noticed, the pilot also had the opportunity to avoid collision thanks to the knowledge of the drone’s position and altitude. During the first flight, when the BSP ship was not noticed, the pilot also had the opportunity to avoid collision thanks to the knowledge of the drone’s position and altitude. This is because the pilot using the DCAS system does not constantly monitor the drone. It also devotes attention to monitoring the application, which reduces BSP detection distance. However, this is not very important, because the pilot knowing about the drone’s activity on the collision course will take a route that will reduce the risk of collision.
The drone position was changed during the test using the DCAS system.

| Scenario 4: Plane C-172 | Lamp: YES | Painting: YES | DCAS: YES | Dron DJI Phantom 4 pro |
| Recorded aircraft sighting distance | Ps1 vs PD | PS2 vs PD | Date: 17-07-2019 | |
| Trial 1 | n/d | |||
| Trial 2 | 267 | n/d | ||
| Trial 3 | 106 | n/d | ||
| Trial 4 | 285 | n/d | ||
| Average distance | 219 | |||
| Numbers of detction | 3 | n/d |
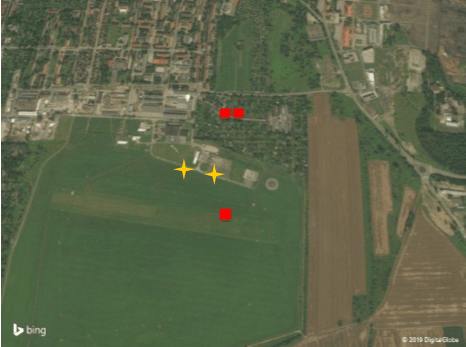
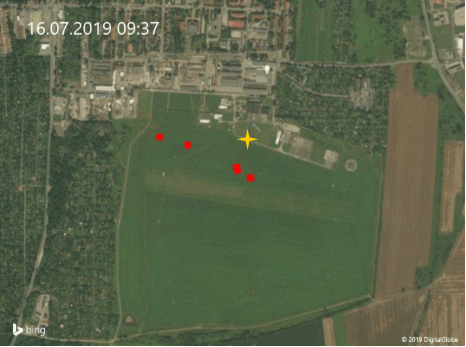
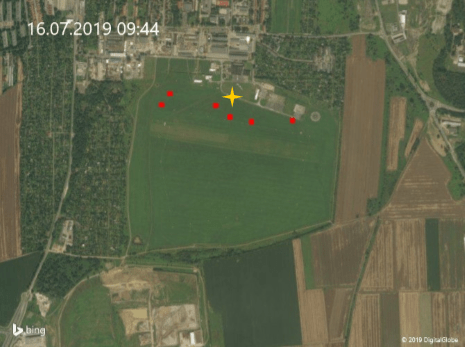
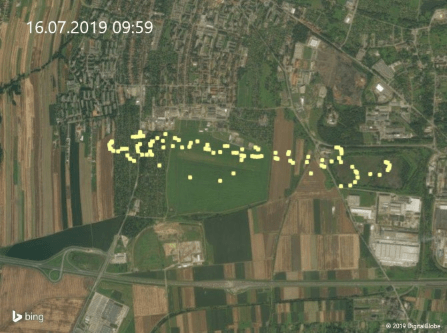
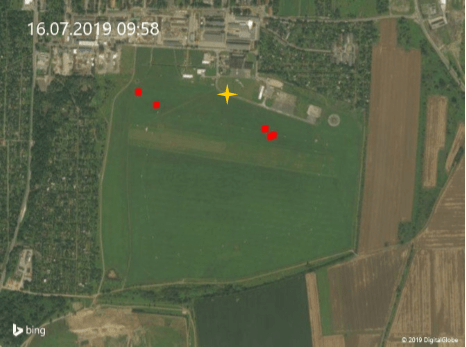
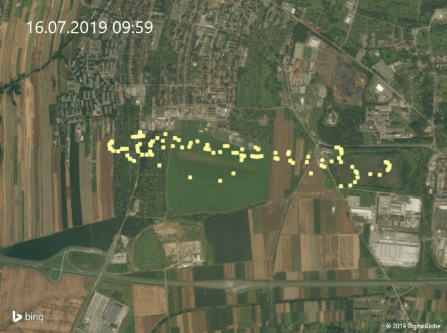
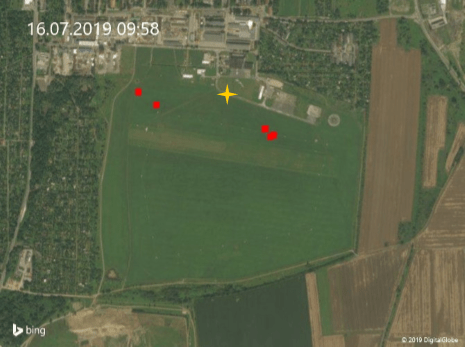
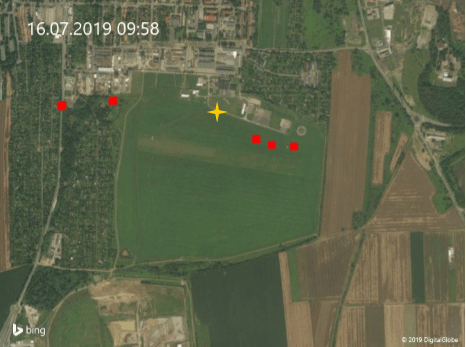
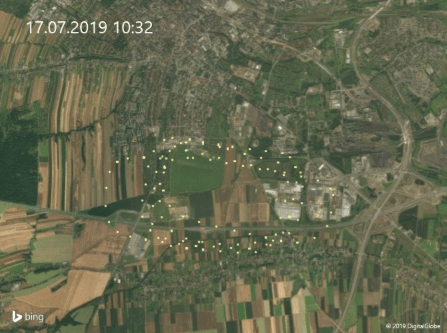
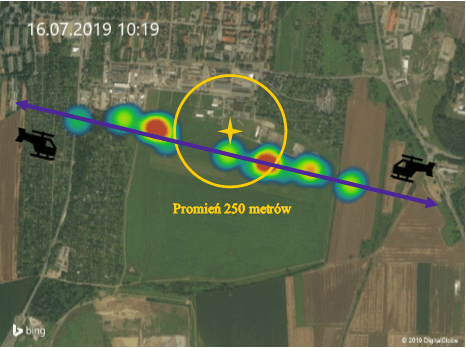
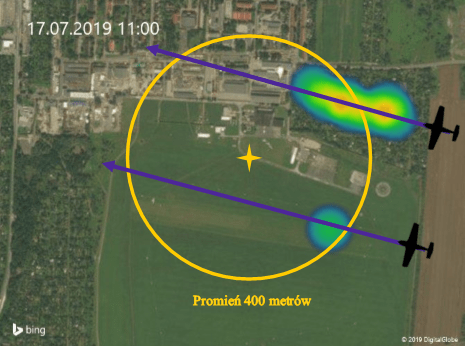
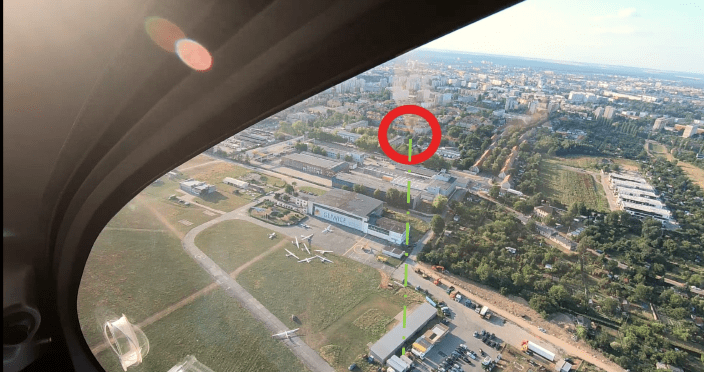
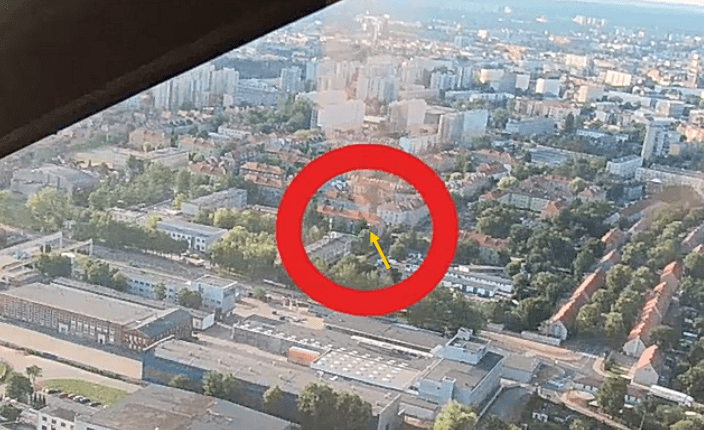
The following graphics indicate the most common places of drone detection for gyroplane flight and for flight by plane. The drone was detected more often from a gyroplane than from an airplane.


Summary
- Drones flying above 100 m AGL should be equipped with a telemetry system informing about their location.
- The telemetry system should send data to the server in real time, from which pilots will be able to download information to their mobile devices, e.g. smartphones. The information should be provided in the form of a message about the distance, direction and height of the drone on the collision course.
- Placing a warning light on the drone has little effect on improving the visibility of the drone.
- Covering the drone with reflective foil does not improve drone visibility.
- Painting the drone in a contrasting color to the ground improves its detection.
- Manned aircraft pilot is not able to effectively separate from the drone based on visual observation in such a way as to detect the drone and perform a maneuver to avoid collisions.
- A separation of 30 meters between the maximum permissible altitude for Open category drones (120 m AGL) and the minimum flight altitude for manned aircraft (150 m AGL) is insufficient and difficult to maintain. Maintaining the maximum altitude for drones in the open category of 120 m AGL requires the imposition of the use of facade maps or other methods indicating the actual height above the terrain.
Institutions participating in the test
- World Drone Pilots Organization (WDPO) – Test organizer,
- Civil Aviation Authority (ULC) – Test observer,
- Polish Air Navigation Services Agency (PANSA) – Test observer,
- Górnośląsko-Zagłębiowska Metropolia (GZM) – Host of the Central European Drone Demonstrator,
- Gliwice Aeroclub (AGL) – Host of the Gliwice airport, access to the Airport, Access to the Cessna 172 aircraft,
- DRON.edu.pl – Drone pilots training and examination center, Drone pilots organization,
- Nextron.pl – Drone Store, Drone Supplier: DJI Phantom 4 pro V2, DJI Matrice 200 V2,
- Remus S.C. – AutoGyro distributor, Piloting a Gyrocopter, providing access to the Cavalon Gyrocopter,
- LINCOR Software sp. z o.o. sp. k. – Development and implementation of GPS / GPRS telemetry system with barometric altitude measurement and DCAS services.