Wykrycie lecącego drona przez pilota samolotu załogowego jest niemal niemożliwe. Nie pomaga oklejenie drona folią odblaskową ani umieszczenie na nim diody sygnalizacyjnej (w warunkach dziennych). Piloci mieli problem z odnalezieniem drona, pomimo iż wskazano im wysokość, na której znajduje się dron oraz jego przybliżone położenie. Jedyne rozwiązanie pomagające ominąć drona to system telemetryczny informujący pilota załogowego statku powietrznego o pozycji i wysokości drona.
Ponadto zachowanie separacji 30 metrowej pomiędzy maksymalną dopuszczalną wysokością lotu drona w kategorii „otwartej” wynoszącą 120 metrów AGL oraz minimalną dopuszczalną wysokością lotu załogowego statku powietrznego wynoszącą 150 metrów AGL jest trudne do realizacji, a w przypadku lotu nad nierównym terenem – niemożliwe. Rozwiązaniem może być konieczność stosowania systemów nawigacyjnych wykorzystujących mapy elewacyjne do określenia aktualnej wysokości nad terenem. Obecnie pilot drona ma wskazywaną wysokość nad miejscem startu, natomiast pilot załogowego statku powietrznego podczas przelotu korzysta z nastaw wysokościomierza ustawionego na ciśnienie panujące nad poziomem morza QNH, a znajomość elewacji terenu ogranicza się głównie do lotnisk, do których ma dolecieć oraz lotnisk awaryjnych. Aktualna wysokość nad gruntem często oceniana jest „na oko”.
W przypadku lotu na trasie, gdzie dochodzi do zmiany elewacji gruntu, oba statki mogą się zderzyć, pomimo iż będą utrzymywały różne (dopuszczalne prawnie) wysokości.
W pierwszym dniu prowadzono próby z wykorzystaniem wiatrakowca Cavalon. Wiatrakowiec pozwala na wykonywanie lotów z niewielką prędkością – około 100 km/h oraz posiada duże przeszklenia kabiny, co miało ułatwić obserwację. Wiatrakowiec wykonywał loty równolegle do osi pasa na wysokości 500 ft AGL (około 150 m). Piloci znali wysokość, na której będzie znajdował się dron oraz znali jego przybliżone położenie. Mimo to wykrycie drona okazało się bardzo trudnym zadaniem. Podczas prób ustalono, że wykorzystanie lampy błyskowej oraz folii odblaskowej ma bardzo niewielki wpływ widoczność drona. Wykrycie drona ułatwia większy kontrast pomiędzy statkiem powietrznym a tłem stanowiący teren nad którym leci. Na tle ciemnej zieleni drzew lepiej widoczny był dron koloru białego. Czarny dron był niezauważalny.
Największą pewność uniknięcia kolizji daje zastosowanie systemu telemetrycznego, który umożliwia wczesne wykrycie drona i modyfikację trasy lotu. System ułatwia również poszukiwanie drona – piloci wiedzą, gdzie skierować wzrok.
W drugim dniu testów loty wykonywane były samolotem Cessna 172. Samolot utrzymywał prędkość
144 km/h. Samolot wykonywał loty po kręgu utrzymując wysokość 500 ft AGL. Ze względu na ograniczoną widoczność z kabiny samolotu, drona mogła dostrzec osoba znajdująca się po stronie, po której mijany był BSP. Dron, jeśli był wykryty, to w pozycji, w której był właśnie mijany. Ograniczona widoczność do przodu przez maskę i śmigło, zniekształcenia od obłej szybki oraz pojawiające się w trakcie lotu zabrudzenia od owadów uniemożliwiają wykrycie drona znajdującego się na kursie kolizyjnym, bez względu na umieszczenie na nim lampki lub oklejenie go folią odblaskową. Jedynie uruchomienie aplikacji wskazującej aktualną pozycję BSP pozwala na skuteczną modyfikację trasy lotu w celu uniknięcia potencjalnej kolizji.
Rozwiązaniem poprawiającym wykrywalność bezzałogowych statków powietrznych (MR) może być system pozwalający na wyświetlanie pozycji dronów, które wykonują lot na wysokości większej niż 100 metrów. System powinien wyświetlać pozycję oraz wysokość takiego drona na urządzeniu mobilnym pilota załogowego statku powietrznego z jak największym wyprzedzeniem, ale nie mniejszym niż 1 km.
Nowe przepisy UE, których wdrożenie nastąpi w połowie 2020 roku zakładają możliwość wykonywania lotów w kategorii OPEN do wysokości 120 m AGL (394 ft). Piloci załogowych statków powietrznych mają możliwość wykonywania lotów na minimalnej wysokości 150 m AGL (poza pewnymi wyjątkami). Chcąc wykonać loty na większej wysokości niż 120 m AGL, pilot drona musi zdobyć odpowiednią zgodę z Urzędu Lotnictwa Cywilnego (ULC) lub realizować lot zgodnie ze standardowym scenariuszem opublikowanym przez ULC. Lot wykonywany jest wtedy w kategorii „szczególnej”. Zarówno zgoda jak i standardowy scenariusz lotu może zawierać pewne ograniczenia oraz wymogi, jakie pilot drona musi spełnić, aby taki lot wykonać. Wymogi mogą nakładać obowiązek wyposażenia drona w rozwiązania polepszające jego widoczność/wykrywalność dla załogowych statków powietrznych, dlatego testy miały na celu uzyskanie odpowiedzi, jak niektóre rozwiązania wpływają na poprawę widoczności/wykrywalności drona.
W lotnictwie ogólnym załogowym loty wykonywane są wg zasad VFR – lot z widocznością lub IFR – lot wg wskazań przyrządów. W przestrzeni klasy G nie zapewnia się separacji statkom powietrznym – pilot lecąc na zasadach VFR jest odpowiedzialny za prowadzenie separacji na podstawie obserwacji wzrokowej. Podczas testów sprawdzono, czy pilot załogowego statku powietrznego może zauważyć drona na kursie kolizyjnym.
| Timdate (HR) | Lat | Long | VelE | VelN | Speed | Angle | Satel | BinIn(H) | Wysokość |
| 16.07.2019 09:19:34 | 50.270653329062824 | 18.67679028537386 | 1 | 254 | 8 | 153 | 8 | 21 | 4 |
Format zapisu danych z urządzenia pomiarowego:
W dniach 16-17 lipca 2019 r. przeprowadzono testy widoczności drona, których celem była weryfikacja skuteczności różnych metod pozwalających na poprawę wykrywalności drona z załogowego statku powietrznego. Podczas prób sprawdzano również, czy pilot drona może wykryć pilota załogowego statku powietrznego za pomocą obrazu rejestrowanego kamerą umieszczoną na dronie. Pozycja załogowego oraz bezzałogowego statku powietrznego była rejestrowana za pomocą systemu telemetrycznego. Pozycja wykrycia drona była zapisywana na urządzeniu pomiarowym przygotowanym specjalnie na okoliczność testów. Podczas prób wszystkie statki powietrzne korzystały z wysokościomierza barometrycznego z nastawionym ciśnieniem elewacji lotniska QFE. Wszystkie wysokościomierze wskazywały wysokość w stopach (ft).
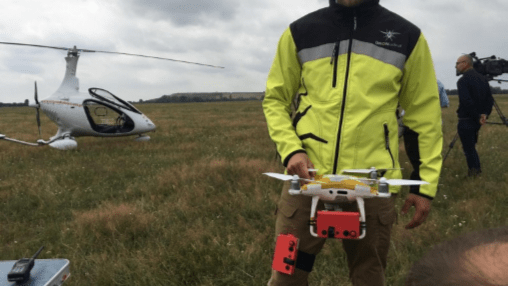
Podczas testów wykonano 40 lotów w tym: 24 loty wiatrakowcem Auto Gyro Cavalon oraz 16 lotów samolotem Cessna 172. Piloci załogowych statków powietrznych posiadali odpowiednie licencje oraz aktualne badania lotniczo-lekarskie klasy II. Drony, które wykorzystano do testu to DJI Phantom 4 pro v2 oraz DJI Matrice 200 V2. Piloci dronów posiadali świadectwa kwalifikacji UAVO z uprawnieniami VLOS, BVLOS, INS, MR 25 kg oraz orzeczenia lotniczo-lekarskie klasy specjalnej (tzw. IV). Próby przeprowadzono zgodnie z 4 różnymi scenariuszami wyposażenia drona. Pierwszy scenariusz zakładał spotkanie drona, który nie jest wyposażony w żadne rozwiązanie wspierające jego widoczność. W kolejnym scenariuszu dron został wyposażony w stroboskop migający światłem koloru białego. Trzeci scenariusz zakładał test drona oklejonego folią odblaskową. Ostatni, czwarty scenariusz zakładał wyposażenie drona w system telemetryczny prezentujący jego pozycję na pokładzie załogowego statku powietrznego w formie ikony na mapie aplikacji zainstalowanej na smartfonie.
Urządzenia monitorujące zainstalowane zostały na dronie w taki sposób, aby nie wpływały na właściwości lotne drona. Przed rozpoczęciem właściwych testów przeprowadzono oblot drona z zainstalowanych urządzeniem. Sprawdzono zgodność danych prezentowanych przez urządzenie porównując je z danymi przesyłanymi przez drona. Testy wykazały, że różnica wskazań wysokościomierza zainstalowanego na dronie oraz wysokości wskazywanej przez urządzenie pomiarowe wynosił około 20 ft.

Urządzenie pomiarowe, z którego korzystali piloci zostało przymocowane do uda każdego z nich za pomocą taśmy z rzepem. Wszystkie urządzenia zostały skalibrowane przed startem, a ich wysokościomierz został wyzerowany i ustawiony na ciśnienie panujące na poziomie lotniska QNH tak, aby wysokościomierz na płycie lotniska wskazywał 0 ft wysokości nad gruntem.
Pozycja wykrycia przez pilotów załogowych statków powietrznych drona zapisywana była poprzez wciśnięcie klawisza na urządzeniu. Powodowało to wymuszenie zapisu nowego rekordu oraz zmianę parametru BinIn (H) z wartości 21 na wartość 29, co w dalszej analizie umożliwiło łatwe odnalezienie miejsca wykrycia drona.
Urządzenie pomiarowe wyposażone jest w kartę SIM, co pozwala na przesyłanie danych lokalizacyjnych w czasie rzeczywistym na serwer. Zapis pozycji realizowany jest automatycznie w odstępach czasowych wynoszących średnio 8 sekund. W pełni naładowane urządzenie pozwala na rejestrację przez 8 godzin.
Pierwszy scenariusz, w pierwszym dniu testów zakładał spotkanie drona, który nie jest wyposażony w żadne rozwiązanie poprawiające jego wykrywalność. Do testów wykorzystano drona DJI Matrice 200 koloru czarnego. Piloci wykonywali lot na wiatrakowcu Cavalon z prędkością około 100 km/h, na wysokości 150 m AGL.
Wykrycie czarnego bezzałogowca było trudnym zadaniem. Na 12 prób piloci wykryli drona 11 razy, ze średniej odległości wynoszącej 180 metrów dla pilota dowódcy statku powietrznego oraz 396 metrów dla drugiego pilota. Wykrycie drona było trudne ze względu na słaby kontrast pomiędzy kolorem drona a ciemną zielenią otoczenia.

| Scenariusz 1: Wiatrakowiec | Lampka: NIE | Malowanie: NIE | DCAS: NIE | Dron Matrice 200 |
| Zarejestrowana odległość zauważenia statku powietrznego | Ps1 vs PD | PS2 vs PD | Date: 16-07-2019 | |
| Próba 1 | 122 | 602 | ||
| Próba 2 | 328 | |||
| Próba 3 | 110 | 240 | ||
| Próba 4 | 207 | 395 | ||
| Próba 5 | 102 | 441 | ||
| Próba 6 | 361 | 374 | ||
| Średnia odległość | 180 | 396 | ||
| Ilość wykryć | 5 | 6 |

Drugi scenariusz, w pierwszym dniu testów zakładał spotkanie drona, który jest wyposażony w migającą lampkę dookólną emitującą białe światło. Do testów wykorzystano drona DJI Matrice 200 koloru czarnego z uruchomioną fabryczną lampką. Piloci wykonywali lot na wiatrakowcu Cavalon z prędkością około 100 km/h, na wysokości 150 m AGL.
Migająca lampka nie pomagała w wykryciu drona, ale ułatwiała utrzymanie wzroku na dronie. Podczas próby piloci na 12 podejść wykryli drona 11 razy. Średnia odległość dla pilota dowódcy wyniosła 212 metrów. Średnia odległość wykrycia dla drugiego pilota wyniosła 369 metrów.

| Scenariusz 2: Wiatrakowiec | Lampka: TAK | Malowanie: NIE | DCAS: NIE | Dron Matrice 200 |
| Zarejestrowana odległość zauważenia statku powietrznego | Ps1 vs PD | PS2 vs PD | Date: 16-07-2019 | |
| Próba 1 | 83 | 225 | ||
| Próba 2 | 311 | 563 | ||
| Próba 3 | 330 | 224 | ||
| Próba 4 | 63 | 406 | ||
| Próba 5 | 153 | 430 | ||
| Próba 6 | 332 | |||
| Średnia odległość | 212 | 396 | ||
| Ilość wykryć | 6 | 5 |

Trzeci scenariusz, w pierwszym dniu testów zakładał spotkanie drona oklejonego folią odblaskową. Do testów wykorzystano drona DJI Phantom 4 pro V2, który został pokryty certyfikowaną folią odblaskową – taką samą, jaka jest używana do oklejania pojazdów uprzywilejowanych. Piloci wykonywali lot na wiatrakowcu Cavalon z prędkością około 100 km/h, na wysokości 150 m AGL.
Oklejenie drona nie miało wpływu na poprawę jego widoczności. Na 12 prób piloci wykryli drona 10 razy. Średnia odległość wykrycia statku przez pilota dowódcę wyniosła 252 metry. Dla drugiego pilota – 468 metrów.
| Scenariusz 3: Wiatrakowiec | Lampka: NIE | Malowanie: TAK | DCAS: NIE | Dron DJI Phantom 4 pro |
| Zarejestrowana odległość zauważenia statku powietrznego | Ps1 vs PD | PS2 vs PD | Date: 16-07-2019 | |
| Próba 1 | 285 | |||
| Próba 2 | 191 | 228 | ||
| Próba 3 | 761 | |||
| Próba 4 | 203 | 444 | ||
| Próba 5 | 371 | 527 | ||
| Próba 6 | 213 | 384 | ||
| Średnia odległość | 252 | 468 | ||
| Ilość wykryć | 5 | 5 |

Czwarty scenariusz, w pierwszym dniu testów zakładał spotkanie drona wyposażonego w system DCAS. System umożliwia prezentację pozycji drona w czasie rzeczywistym na smartfonie znajdującym się w kabinie pilotów. Do testów wykorzystano drona DJI Phantom 4 pro V2. Piloci wykonywali lot na wiatrakowcu Cavalon z prędkością około 100 km/h, na wysokości 150 m AGL.
Wykorzystanie systemu znacznie ułatwiło wykrycie drona w powietrzu. Na 12 prób piloci wykryli drona 12 razy. Średnia odległość wykrycia drona przez pilota dowódcę wyniosła 271 metrów. Średnia odległość wykrycia drona przez drugiego pilota wyniosła 287 metrów.
System DCAS daje możliwość wykrycia drona na kursie kolizyjnym i zmiany kursu lotu na długo przed jego zobaczeniem. Piloci znając pozycję drona nie muszą go wyszukiwać wzrokiem, co jest zadaniem mocno obciążającym, bo wymaga skupienia i poświęcenia niemal 100% koncentracji.
| Scenariusz 4: Wiatrakowiec | Lampka: NIE | Malowanie: NIE | DCAS: TAK | Dron DJI Phantom 4 pro |
| Zarejestrowana odległość zauważenia statku powietrznego | Ps1 vs PD | PS2 vs PD | Date: 16-07-2019 | |
| Próba 1 | 149 | 166 | ||
| Próba 2 | 438 | 324 | ||
| Próba 3 | 346 | 112 | ||
| Próba 4 | 329 | 596 | ||
| Próba 5 | 147 | 404 | ||
| Próba 6 | 219 | 124 | ||
| Średnia odległość | 271 | 287 | ||
| Ilość wykryć | 6 | 6 |
Pierwszy scenariusz, w drugim dniu testów zakładał spotkanie drona, który nie jest wyposażony w żadne rozwiązanie poprawiające jego wykrywalność. Do testów wykorzystano drona DJI Matrice 200 koloru czarnego. Pilot wykonywał lot na samolocie Cessna C-172 z prędkością około 144 km/h, na wysokości 150 m AGL. Podczas testów notowano wyłącznie wskazania pilota dowódcy.
Wykrycie czarnego drona było ponownie trudnym zadaniem. Na 4 próby pilot wykrył drona tylko jeden raz w odległości 308 metrów. Zaobserwowanie drona z pokładu samolotu Cessna 172 jest bardzo trudne ze względu na większą prędkość lotu niż w wiatrakowcu oraz znacznie mniejsze pole widzenia, które dodatkowo ograniczone jest śmigłem, dużą maską i o wiele mniejszymi przeszkleniami.

| Scenariusz 1: Samolot C-172 | Lampka: NIE | Malowanie: NIE | DCAS: TAK | Dron Matrice 200 |
| Zarejestrowana odległość zauważenia statku powietrznego | Ps1 vs PD | PS2 vs PD | Date: 17-07-2019 | |
| Próba 1 | brak | |||
| Próba 2 | brak | |||
| Próba 3 | brak | |||
| Próba 4 | brak | |||
| Średnia odległość | 308 | |||
| Ilość wykryć | 1 | brak |

Drugi scenariusz, w drugim dniu testów zakładał spotkanie drona, który jest wyposażony w migającą lampkę dookolną emitującą białe światło. Do testów wykorzystano drona DJI Matrice 200 koloru czarnego z włączonym fabrycznym stroboskopem. Piloci wykonywali lot na samolocie Cessna 172 z prędkością około 144 km/h, na wysokości 150 m AGL.
Wykorzystanie lampki nie miało znaczącego wpływu na wykrywalność drona. Na 4 próby pilot wykrył drona 2 razy, ze średniej odległości 452 metry. Miganie lampki ze wskazanej odległości nie jest widoczne. Sygnał świetlny można było zaobserwować dopiero z odległości około 200 metrów.
| Scenariusz 2: Samolot C-172 | Lampka: TAK | Malowanie: NIE | DCAS: TAK | Dron Matrice 200 |
| Zarejestrowana odległość zauważenia statku powietrznego | Ps1 vs PD | PS2 vs PD | Date: 17-07-2019 | |
| Próba 1 | brak | |||
| Próba 2 | 456 | brak | ||
| Próba 3 | brak | |||
| Próba 4 | 448 | brak | ||
| Średnia odległość | 452 | |||
| Ilość wykryć | 2 | brak |

Trzeci scenariusz, w drugim dniu testów zakładał spotkanie drona, który jest oklejony folią odblaskową. Do testów wykorzystano drona DJI Phantom 4 pro V2—został on pokryty certyfikowaną folią odblaskową – taką samą, jaka jest używana do oklejania pojazdów uprzywilejowanych. Piloci wykonywali lot na samolocie Cessna C – 172 z prędkością około 144 km/h, na wysokości 150 m AGL.
Oklejenie drona folią miało niewielki wpływy na poprawę widoczności. Na 4 próby pilot wykrył drona 2 razy, ze średniej odległości 397 metrów.

| Scenariusz 3: Samolot C-172 | Lampka: TAK | Malowanie: TAK | DCAS: TAK | Dron DJI Phantom 4 pro |
| Zarejestrowana odległość zauważenia statku powietrznego | Ps1 vs PD | PS2 vs PD | Date: 17-07-2019 | |
| Próba 1 | brak | |||
| Próba 2 | 434 | brak | ||
| Próba 3 | brak | |||
| Próba 4 | 360 | brak | ||
| Średnia odległość | 397 | |||
| Ilość wykryć | 2 | brak |

Czwarty scenariusz, w drugim dniu testów zakładał spotkanie z dronem wyposażonym w system DCAS. Do testów wykorzystano sprzęt marki DJI Phantom 4 pro V2. Piloci wykonywali lot na samolocie Cessna C – 172 z prędkością około 144 km/h na wysokości 150 m AGL.
Wykorzystanie systemu DCAS pozwoliło na poprawę wykrywalności drona. Na 4 próby pilot dostrzegł drona 3 razy. Podczas pierwszego przelotu, gdy statek BSP nie został zauważony, pilot również miał możliwość uniknięcia kolizji dzięki znajomości pozycji oraz wysokości lotu drona. Warto zanotować, że średnia odległość wykrycia wielowirnikowca wcale nie wzrosła, a nawet zmalała. To dlatego, że pilot korzystający z systemu DCAS nie prowadzi nieustannej obserwacji w poszukiwaniu drona. Poświęca również uwagę na monitorowanie aplikacji, co powoduje zmniejszenie odległości wykrycia BSP. Nie ma to jednak wielkiego znaczenia, gdyż pilot wiedząc o aktywności drona na kursie kolizyjnym obierze trasę, która ograniczy ryzyko zderzenia.
Podczas próby z wykorzystaniem systemu DCAS pozycja drona była zmieniana.

| Scenariusz 4: Samolot C-172 | Lampka: TAK | Malowanie: TAK | DCAS: TAK | Dron DJI Phantom 4 pro |
| Zarejestrowana odległość zauważenia statku powietrznego | Ps1 vs PD | PS2 vs PD | Date: 17-07-2019 | |
| Próba 1 | brak | |||
| Próba 2 | 267 | brak | ||
| Próba 3 | 106 | brak | ||
| Próba 4 | 285 | brak | ||
| Średnia odległość | 219 | |||
| Ilość wykryć | 3 | brak |
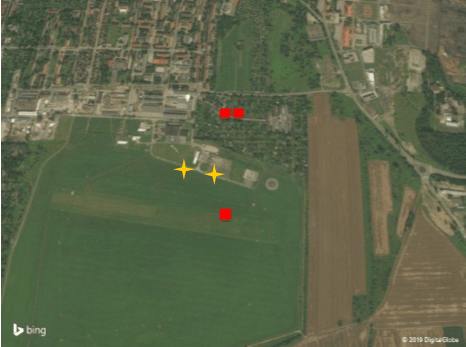
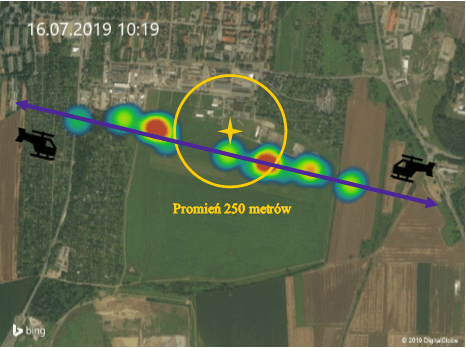
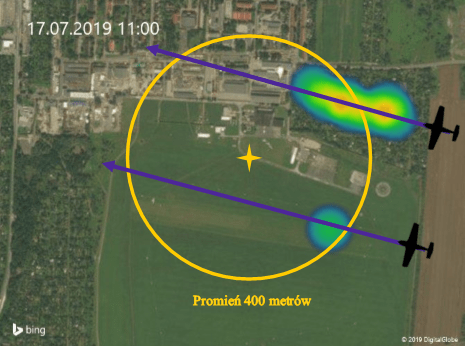
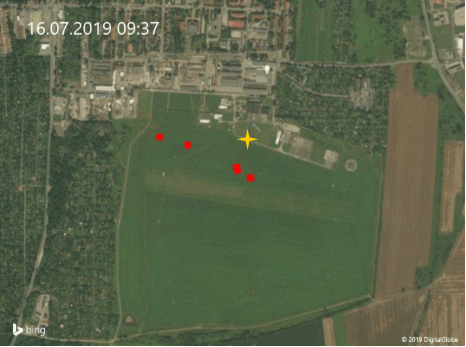
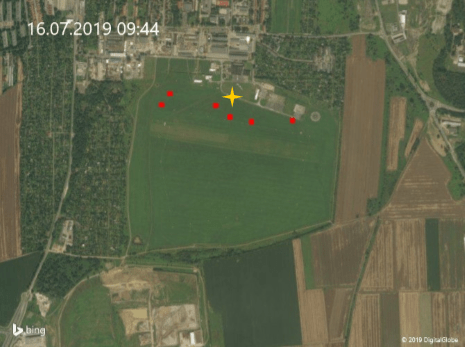
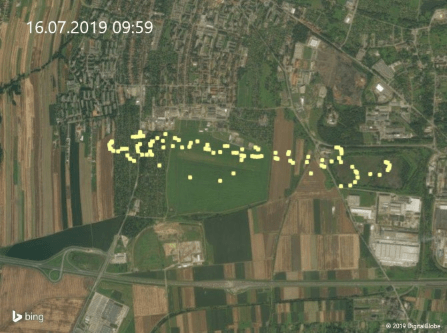
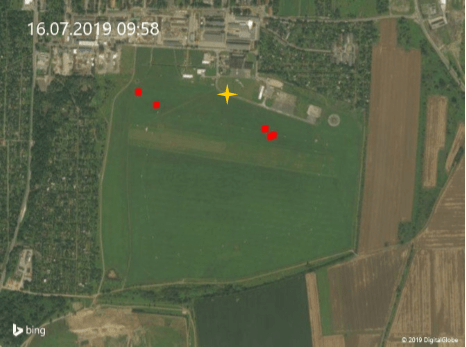
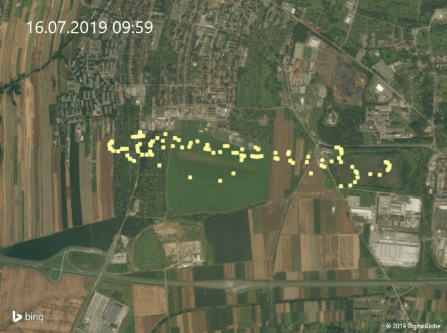
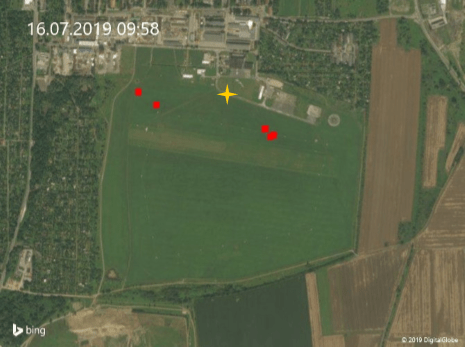
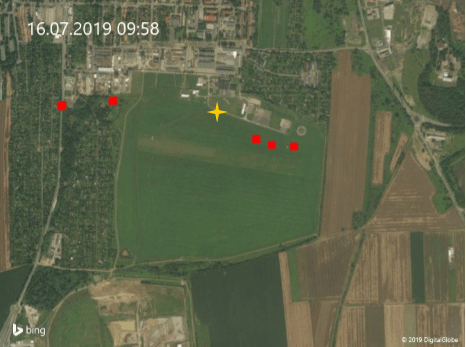
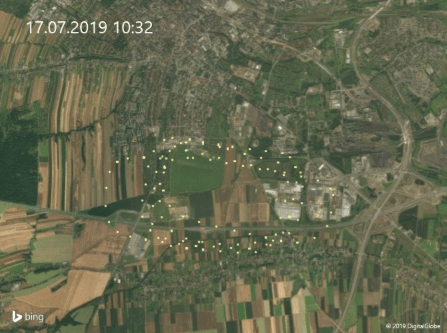
Na poniższych grafikach wskazano najczęstsze miejsca wykrycia drona dla lotu wiatrakowcem oraz dla lotu samolotem. Dron był wykrywany częściej z wiatrakowca niż z samolotu.